V-855.556023E0
High-speed linear stage; ironless 3-phase linear motor; 200 mm travel range; 600 N load capacity; 4000 mm/s maximum velocity; absolute linear encoder, 5 nm sensor resolution, BiSS-C



Compact industrial design for applications with low power requirements
The V-855 is a heavy-duty and highly dynamic linear stage for industrial applications. Its design is consistently geared to demanding industrial conditions and it is characterized by high stiffness and the use of high-quality components: recirculating ball bearing guides, 3-phase linear motor, incremental or absolute linear encoder. The high resolution of the encoders allows for an excellent tracking performance, small tracking errors, and fast settling times. The optional motion platform offers versatile assembly options with a triple M6 hole pattern.
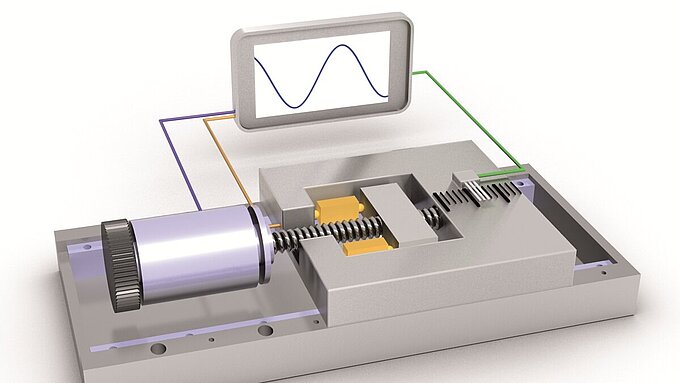
Linear motor with direct drive
3-phase magnetic direct drives do not use mechanical components in the drivetrain, but transmit the drive force to the motion platform directly and without friction. The drives reach high velocities and accelerations. Ironless motors are particularly suitable for positioning tasks with the highest demands on precision because there is no undesirable interaction with the permanent magnets. This allows smooth running even at the lowest velocities and at the same time, there is no vibration at high velocities. Nonlinearity in control behavior is avoided and any position can be controlled easily. The drive force can be set freely.
Options
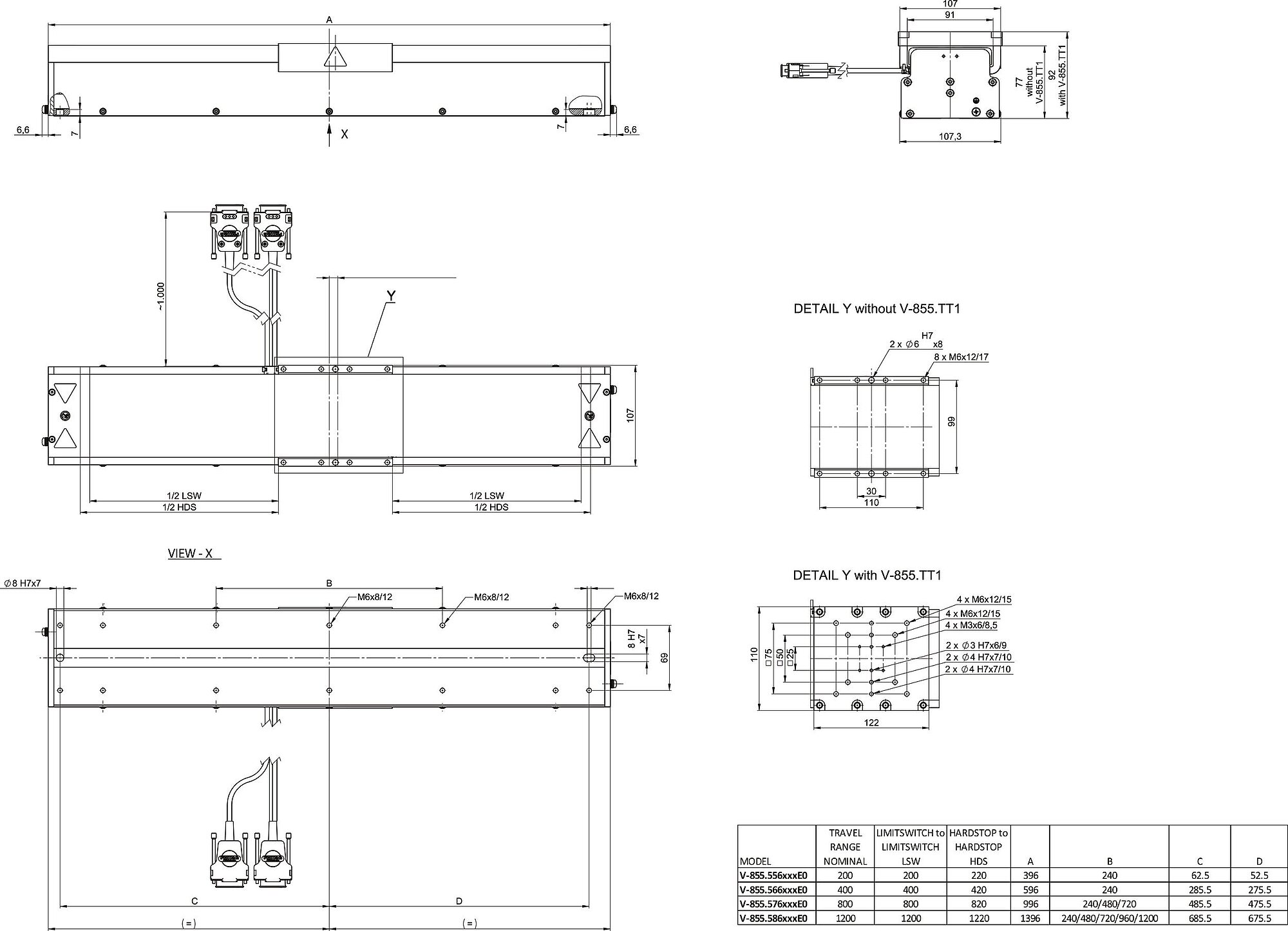
Optional accessory: V-855.TT1 motion platform
Application fields
| Motion | V-855.556023E0 | V-855.566023E0 | V-855.576023E0 | V-855.556211E0 | V-855.566211E0 | V-855.576211E0 | Tolerance |
|---|---|---|---|---|---|---|---|
| Active axes | X | X | X | X | X | X | |
| Travel range in X | 200 mm | 400 mm | 800 mm | 200 mm | 400 mm | 800 mm | |
| Acceleration in X, unloaded | 50 m/s² | 50 m/s² | 50 m/s² | 50 m/s² | 50 m/s² | 50 m/s² | max. |
| Maximum velocity in X, unloaded | 4000 mm/s | 4000 mm/s | 4000 mm/s | 4000 mm/s | 4000 mm/s | 4000 mm/s | |
| Straightness error in Y (straightness) | ± 8 µm | ± 12 µm | ± 20 µm | ± 8 µm | ± 12 µm | ± 20 µm | max. |
| Straightness error in Z (flatness) | ± 10 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 10 µm | max. |
| Angular error around Y (pitch) | ± 75 µrad | ± 100 µrad | ± 150 µrad | ± 75 µrad | ± 100 µrad | ± 150 µrad | max. |
| Angular error around Z (yaw) | ± 125 µrad | ± 150 µrad | ± 200 µrad | ± 125 µrad | ± 150 µrad | ± 200 µrad | max. |
| Positioning | V-855.556023E0 | V-855.566023E0 | V-855.576023E0 | V-855.556211E0 | V-855.566211E0 | V-855.576211E0 | Tolerance |
| Minimum incremental motion in X | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | 0.1 µm | max. |
| Positioning accuracy in X, uncalibrated | ± 10 µm | ± 15 µm | ± 20 µm | ± 10 µm | ± 15 µm | ± 20 µm | max. |
| Bidirectional repeatability in X | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | max. |
| Limit switches | — | — | — | Hall effect, N/C contact, 5 V, NPN | Hall effect, N/C contact, 5 V, NPN | Hall effect, N/C contact, 5 V, NPN | |
| Integrated sensor | Absolute linear encoder | Absolute linear encoder | Absolute linear encoder | Incremental linear encoder | Incremental linear encoder | Incremental linear encoder | |
| Sensor signal | BiSS-C | BiSS-C | BiSS-C | Sin/cos, 1 V peak-to-peak | Sin/cos, 1 V peak-to-peak | Sin/cos, 1 V peak-to-peak | |
| Sensor signal period | — | — | — | 20 µm | 20 µm | 20 µm | |
| Sensor resolution | 5 nm | 5 nm | 5 nm | — | — | — | |
| Drive properties | V-855.556023E0 | V-855.566023E0 | V-855.576023E0 | V-855.556211E0 | V-855.566211E0 | V-855.576211E0 | Tolerance |
| Drive type | Ironless 3-phase linear motor | Ironless 3-phase linear motor | Ironless 3-phase linear motor | Ironless 3-phase linear motor | Ironless 3-phase linear motor | Ironless 3-phase linear motor | |
| Nominal voltage | 60 V | 60 V | 60 V | 60 V | 60 V | 60 V | |
| Peak voltage | 60 V | 60 V | 60 V | 60 V | 60 V | 60 V | |
| Nominal current, RMS | 3.2 A | 3.2 A | 3.2 A | 3.2 A | 3.2 A | 3.2 A | typ. |
| Peak current, RMS | 7.3 A | 7.3 A | 7.3 A | 7.3 A | 7.3 A | 7.3 A | typ. |
| Drive force in X | 39 N | 39 N | 39 N | 39 N | 39 N | 39 N | typ. |
| Peak force in X | 90 N | 90 N | 90 N | 90 N | 90 N | 90 N | |
| Force constant | 12.4 N/A | 12.4 N/A | 12.4 N/A | 12.4 N/A | 12.4 N/A | 12.4 N/A | |
| Motor constant | 5.39 N/√W | 5.39 N/√W | 5.39 N/√W | 5.39 N/√W | 5.39 N/√W | 5.39 N/√W | typ. |
| Time constant | 0.36 ms | 0.36 ms | 0.36 ms | 0.36 ms | 0.36 ms | 0.36 ms | |
| Resistance phase-phase | 3.5 Ω | 3.5 Ω | 3.5 Ω | 3.5 Ω | 3.5 Ω | 3.5 Ω | typ. |
| Inductance phase-phase | 1.2 mH | 1.2 mH | 1.2 mH | 1.2 mH | 1.2 mH | 1.2 mH | |
| Back EMF phase-phase | 10 V·s/m | 10 V·s/m | 10 V·s/m | 10 V·s/m | 10 V·s/m | 10 V·s/m | max. |
| Pole pitch N-N | 24 mm | 24 mm | 24 mm | 24 mm | 24 mm | 24 mm | |
| Mechanical properties | V-855.556023E0 | V-855.566023E0 | V-855.576023E0 | V-855.556211E0 | V-855.566211E0 | V-855.576211E0 | Tolerance |
| Permissible push force in Y | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | max. |
| Permissible push force in Z | 600 N | 600 N | 600 N | 600 N | 600 N | 600 N | max. |
| Moved mass in X, unloaded | 800 g | 800 g | 800 g | 800 g | 800 g | 800 g | |
| Guide | Recirculating ball bearing guide | Recirculating ball bearing guide | Recirculating ball bearing guide | Recirculating ball bearing guide | Recirculating ball bearing guide | Recirculating ball bearing guide | |
| Overall mass | 3800 g | 6800 g | 10500 g | 3800 g | 6800 g | 10500 g | |
| Material | Aluminum, black anodized; steel (guide rail) | Aluminum, black anodized; steel (guide rail) | Aluminum, black anodized; steel (guide rail) | Aluminum, black anodized; steel (guide rail) | Aluminum, black anodized; steel (guide rail) | Aluminum, black anodized; steel (guide rail) | |
| Miscellaneous | V-855.556023E0 | V-855.566023E0 | V-855.576023E0 | V-855.556211E0 | V-855.566211E0 | V-855.576211E0 | Tolerance |
| Operating temperature range | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | |
| Connector | HD D-sub 26 (m) | HD D-sub 26 (m) | HD D-sub 26 (m) | HD D-sub 26 (m) | HD D-sub 26 (m) | HD D-sub 26 (m) | |
| Sensor connector | D-sub 15 (f) | D-sub 15 (f) | D-sub 15 (f) | D-sub 15 (f) | D-sub 15 (f) | D-sub 15 (f) | |
| Cable length | 1 m | 1 m | 1 m | 1 m | 1 m | 1 m | |
| Recommended controllers/drivers | G-901: G-901.R319, G-901.R3199, G-901.R4199 ACS modular controller | G-901: G-901.R319, G-901.R3199, G-901.R4199 ACS modular controller | G-901: G-901.R319, G-901.R3199, G-901.R4199 ACS modular controller | G-901: G-901.R319, G-901.R3199, G-901.R4199 ACS modular controller | G-901: G-901.R319, G-901.R3199, G-901.R4199 ACS modular controller | G-901: G-901.R319, G-901.R3199, G-901.R4199 ACS modular controller |
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
V-855.5x6023E0 High-Speed Linear Stage
V-855.5x6211E0 High-Speed Linear Stage
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
High-speed linear stage; ironless 3-phase linear motor; 200 mm travel range; 600 N load capacity; 4000 mm/s maximum velocity; absolute linear encoder, 5 nm sensor resolution, BiSS-C
High-speed linear stage; ironless 3-phase linear motor; 400 mm travel range; 600 N load capacity; 4000 mm/s maximum velocity; absolute linear encoder, 5 nm sensor resolution, BiSS-C
High-speed linear stage; ironless 3-phase linear motor; 800 mm travel range; 600 N load capacity; 4000 mm/s maximum velocity; absolute linear encoder, 5 nm sensor resolution, BiSS-C
High-speed linear stage; ironless 3-phase linear motor; 200 mm travel range; 600 N load capacity; 4000 mm/s maximum velocity; incremental linear encoder, 20 µm sensor signal period, sin/cos, 1 V peak-peak
High-speed linear stage; ironless 3-phase linear motor; 400 mm travel range; 600 N load capacity; 4000 mm/s maximum velocity; incremental linear encoder, 20 µm sensor signal period, sin/cos, 1 V peak-peak
High-speed linear stage; ironless 3-phase linear motor; 800 mm travel range; 600 N load capacity; 4000 mm/s maximum velocity; incremental linear encoder, 20 µm sensor signal period, sin/cos, 1 V peak-peak
Quickly receive an answer to your question by email or phone from a local PI sales engineer.
Dans le concept hybride, le servomoteur DC (grandes gammes de déplacement) et l'entraînement piézo (précision au nanomètre) sont combinés l'un avec l'autre.

PIMag® 6-D est un système de positionnement électromagnétique dans lequel la plateforme passive lévite sur un champ magnétique et est guidée activement par celui-ci.

Les entraînements directs magnétiques présentent des avantages par rapport aux technologies classiques basées sur des vis précontraintes ou à billes, notamment en termes d'usure et de dynamique.

Les moteurs électriques rotatifs tels que les moteur DC ou moteurs pas à pas sont utilisés en liaison avec des entraînements à vis.

Les moteurs électriques rotatifs tels que les moteur DC ou moteurs pas à pas sont utilisés en liaison avec des entraînements à vis. Les systèmes de moteur pas à pas avec encodeurs haute résolution peuvent réaliser des mouvements avec une résolution opérationnelle de 10 nm et une fiabilité et une reproductibilité élevées.




