- Optional integrated encoder with resolution of 1 nm (10 nrad)
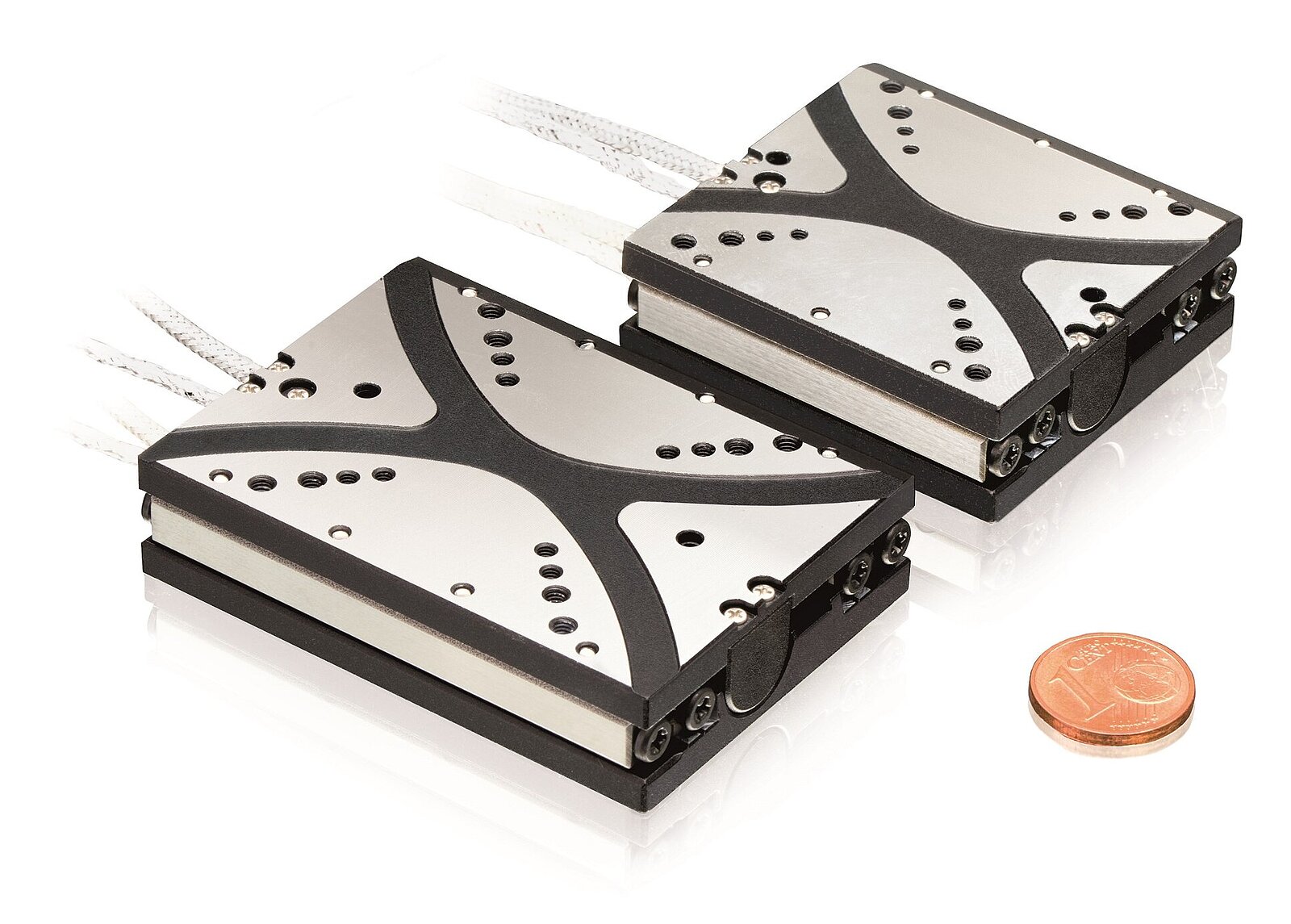
- Miniature linear and rotation stages
- Nonmagnetic and vacuum-compatible operating principle
- Self-locking at rest, no heat generation
Piezo inertia drives are space-saving and inexpensive piezo-based drives with relatively high holding forces and a virtually unlimited travel range. They make use of the stick-slip effect (inertia effect) – a cyclical alternation of static and sliding friction between a runner and the drive element generated by the piezo element – for a continuous feed of the runner. The operating frequency of more than 20 kHz enables the runner to be directly driven at velocities in excess of 5 mm/s.

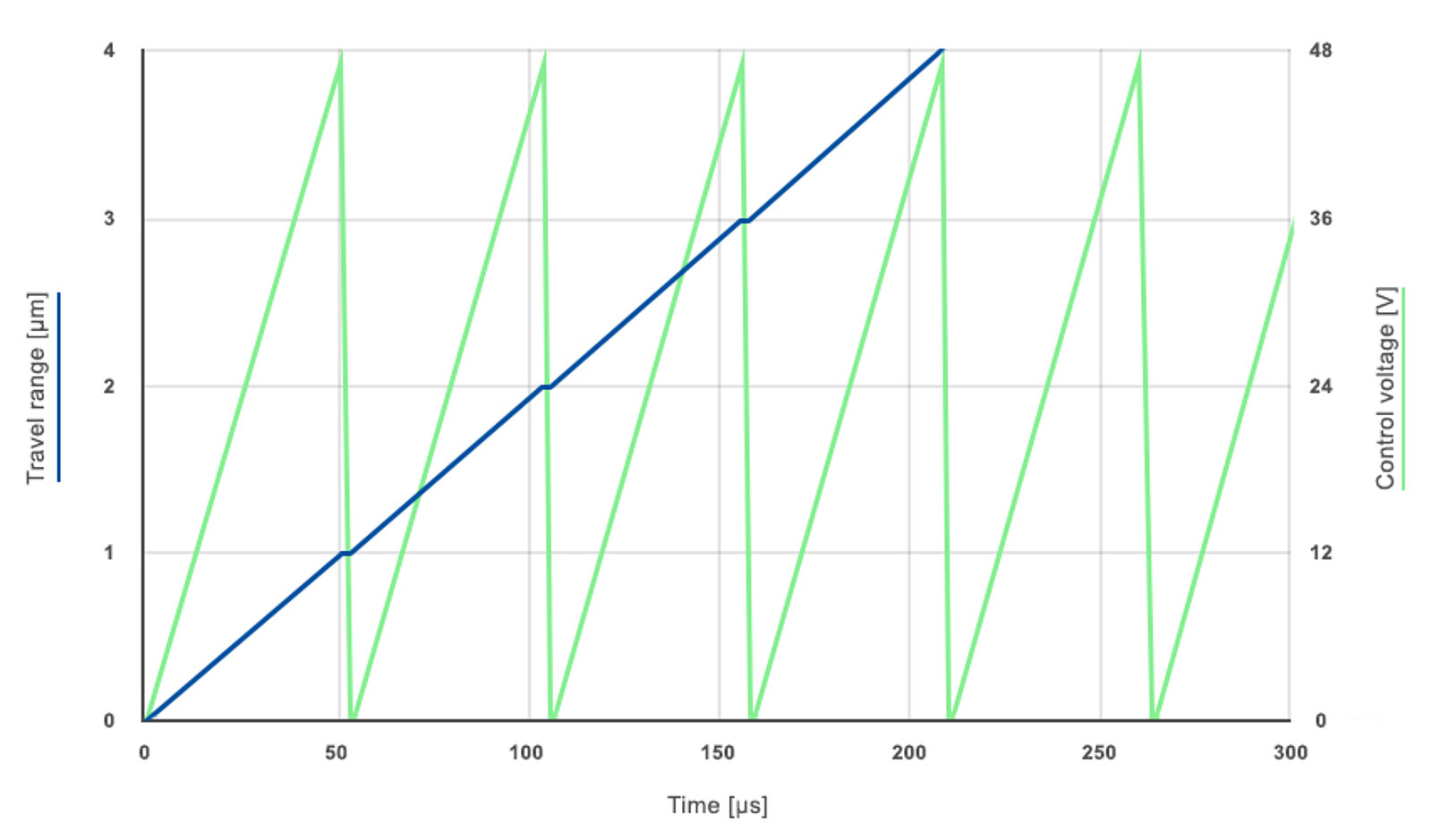
The inertia drive principle is based on a single piezoelectrical actuator that is controlled with a modified sawtooth voltage generated by the drive electronics. The actuator expands slowly and moves the runner. Due to its inertia, the runner is unable to follow the fast contraction of the actuator and remains at its position.
Tangential Drive
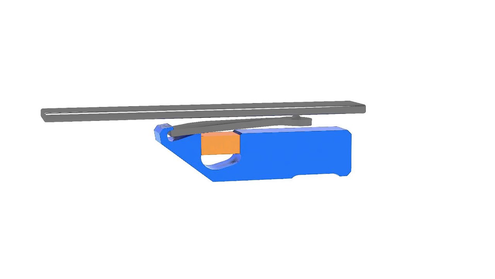
A drive element mounted on the side of the runner allows linear or rotary motion and a particularly small design of the stage. In conjunction with suitable incremental encoders, linear and rotation stages are possible with a width of just over 20 mm and a height of only 10 mm. The sizes are even smaller for open-loop operation without sensor.
Rod Drive
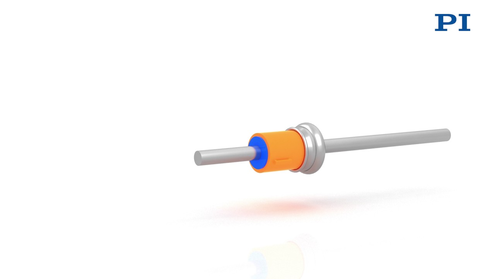
Compared with tangential drives, rod drives provide a larger coupling surface between the piezoceramic actuator and runner. This results in relatively high holding forces of up to 10 N. The runner is guided through the inner hole of the actuator, which still allows a very compact drive design. The rod drive is in products such as the position-controlled Q-545 linear stage with a width of 45 mm or the N-412 OEM linear actuators.
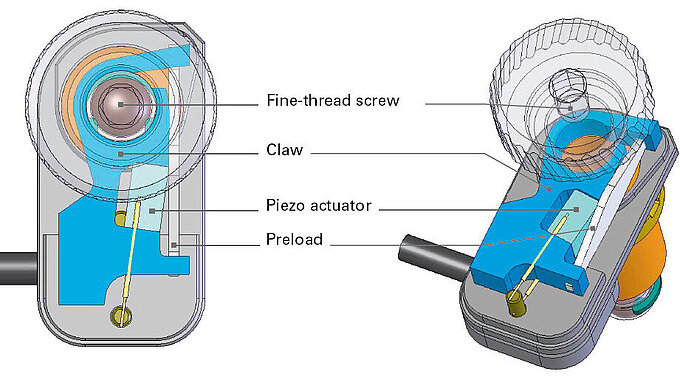
PiezoMike Drive

Unlike direct drives, expansion of the PiezoMike actuators causes rotary motion of a claw. Because the claw clamps onto the fine-thread screw, the resulting motion then turns the screw. The thread reduction makes it possible to generate high holding forces up to >100 N at feed forces of >22 N.
Nanometer Resolution
During the slow control phase (stick phase), in which the runner is moved, the drive behaves in the same way as a classical piezoceramic actuator. By varying the voltage applied, the actuator can take any position and therefore achieves the high motion resolution that is typical for piezo ceramics.
Together with an incremental encoder for measuring the position, it is possible to achieve high positioning accuracy and repeatability of the motion over long travel ranges.
Silent and Energy-Saving
The drive works silently at the maximum operating frequency of 20 kHz. When at rest, the drive is self-locking, requires no current and does not generate any heat. It holds the position with maximum force. It is therefore particularly suitable for battery-operated, mobile applications with low load cycle values. The piezo voltage also varies according to the drive type. In the case of tangential drives, it is under 48 V and for rod drives, up to 100 V.




